智能交通系统

图1 天津大学智能驾驶汽车
一、智能驾驶汽车
天津大学智能驾驶汽车交叉研究平台涵盖了车辆动力、仪器工程、图像处理、机器学习、自动控制和语音识别等研究方向,包括环境感知、路径规划、行为决策、车辆控制等多个模块。环境感知作为第一环节,处于智能驾驶车辆与外界环境信息交互的关键位置,其关键在于使智能驾驶车辆更好地模拟人类驾驶员的感知能力,从而理解自身和周边的驾驶态势。实验室重点研究无人驾驶平台中环境感知系统的设计与构建,主要研究内容包含基于视觉的即时定位与地图构建方法(SLAM),基于深度学习的障碍物检测方法,激光雷达点云数据处理算法以及激光雷达与相机数据融合方法等。
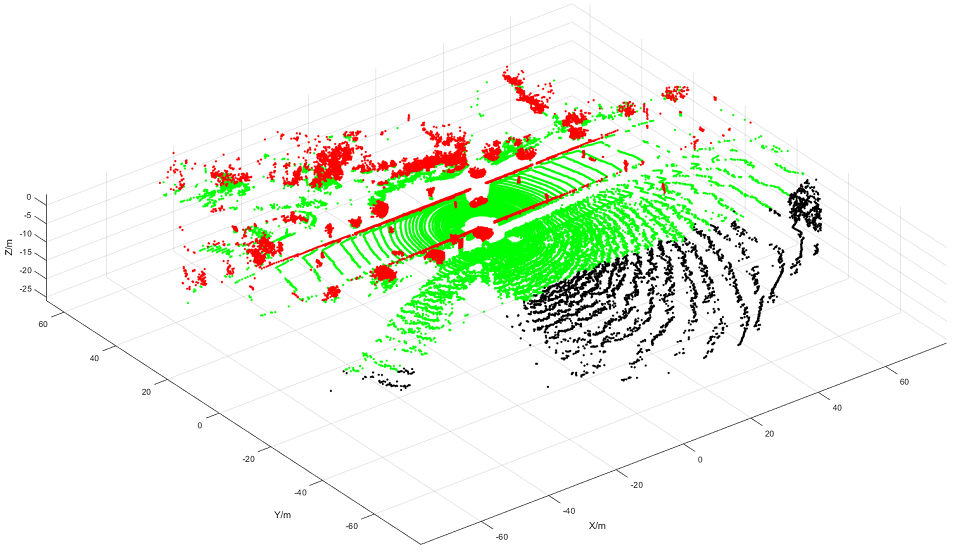
图2 激光雷达点云数据处理
二、公路视觉检测系统
为保障交通安全,在役高速公路安全设施的日常巡检养护至关重要。实验室搭建基于机器视觉的高速公路交通安全设施缺损智能检测系统。该系统使用高速工业相机作为环境感知传感器获得丰富的纹理信息,用于目标检测和分析,通过32线激光雷达获取环境三维点云信息,用于目标轮廓与距离的探测。该系统目标为实现检测车时速100km/h时,对道路交通标志扭曲形变、交通标线磨损、钢护栏缺损、路面坑槽以及路面洒落物的检测。

图3 公路检测系统架构
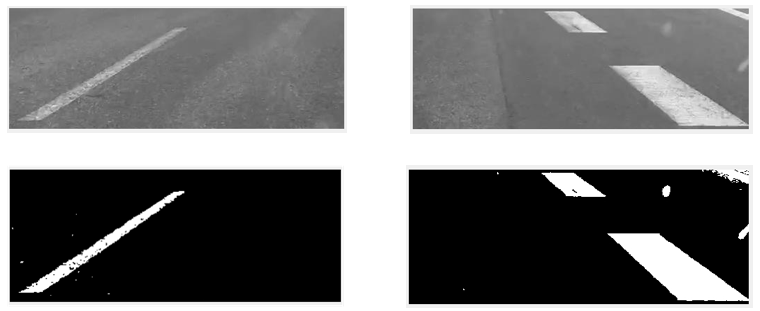
图4 车道线检测
三、混凝土裂缝智能检测
混凝土结构广泛应用于桥梁、公路等建筑工程。裂缝是混凝土结构中最常见的病害。因裂缝导致桥梁等混凝土建筑破损比例达90%以上。准确、及时地进行混凝土结构病害检修,是提高混凝土建筑使用寿命、减少事故发生的关键。实验室自主研发便携一体化混凝土裂缝智能检测仪,以实现对任意长度混凝土裂缝的连续测量,识别准确率大于95%,测量精度高达0.05mm,有效提高检测效率、精度与适应性。
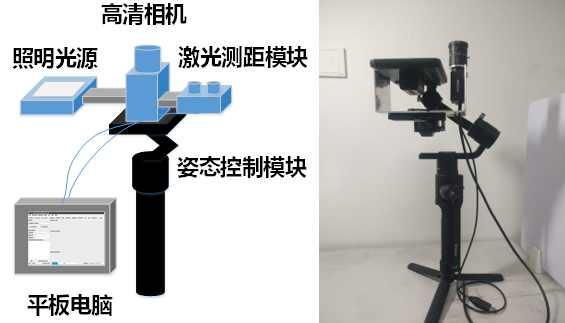
图5 裂缝检测系统
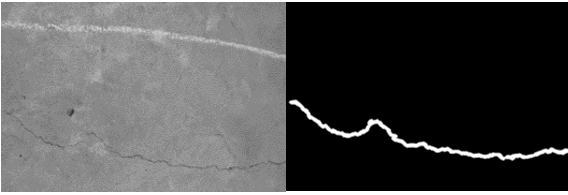
图6 混凝土裂缝检测